

The drum was made from some steel tubing. It's driven by a small brushless motor I scrounged via a press fit aluminum hub:

I scrounged some tiny gearmotors and grabbed one of my spare quadrotor batteries:
 |
| Starting to look like a robot |
I turned some very shiny wheels out of 2" aluminum round stock. The tires are made from short segments of bicycle inner tube.


As a backup defense mechanism, I made the non-attacking side of the robot wedge-shaped. The tip of the wedge was milled from aluminum, using some very sketchy clamping techniques:

The rest of the robot's shell is carbon fiber. Because of the robot's wedge-shape, I named it "A Glorified Doorstop." When it fails miserably as a robot, you know how I'll use it.


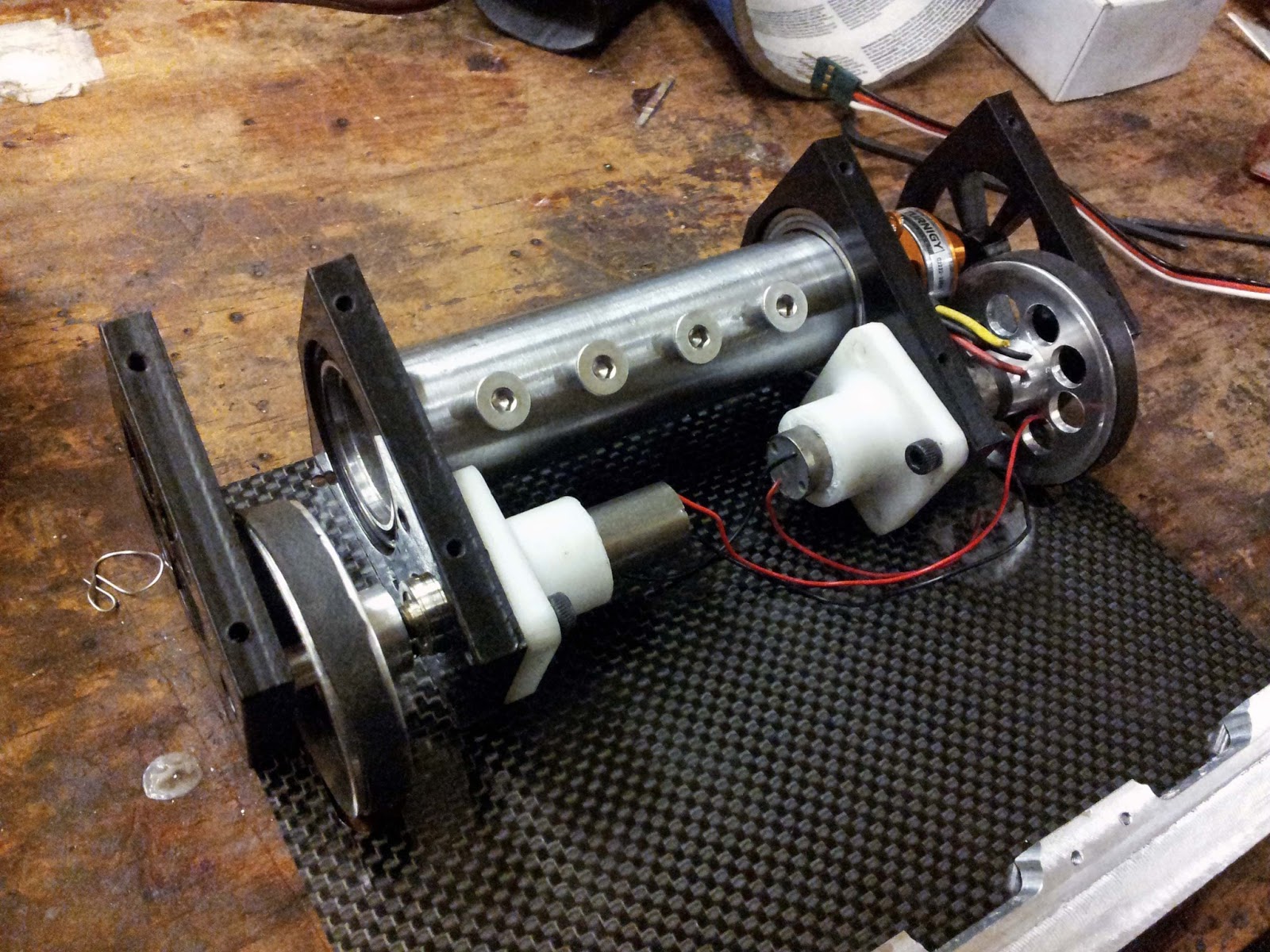
To actually hold all the parts inside the shell, I laser cut a Delrin frame. The motors are press fit into 3D printed mounts, and the drum rotates around a pair of low-profile bearings on the outside of the drum. I put the bearings on the outside, because I could not spare the weight for an axle about which the drum could rotate.

The Delrin pieces were edge tapped and screwed to the carbon fiber.

So the spinning drum could catch opposing robots, I added some flat head socket cap screws around it. They thread into an aluminum nut strip on the inside of the drum.
Electronics were pretty straight forward. An RC receiver feeds signals to a Turnigy Plush 6A brushless controller for the weapon motor, and two VEX 29 controllers for the DC drive motors. For some unknown reason, I was unable to get the drive controllers working on a 3S LiPo pack (11.1V), so the robot is painfully slow. I think the issue is probably with the brushless controller (which provides 5V to the receiver), since it's really only meant for 2S batteries.
And some pretty pictures:




An event report will follow. If only its destructive abilities matched its good looks...
No comments:
Post a Comment